Position Analysis (Vector Loop Method)
Four-Bar Linkage Vector Loop Equations
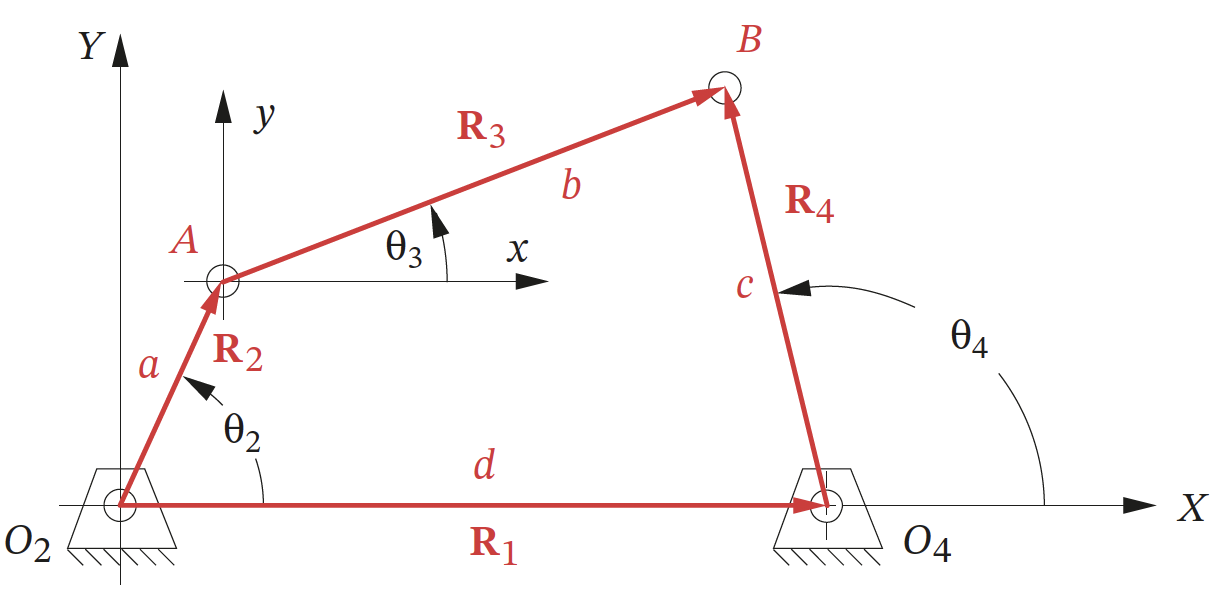
The derivation of the vector loop equation for a four-bar linkage mechanism involves defining the position vectors of the links and the angles between them. The four-bar linkage consists of four links connected by four joints, forming a closed loop as shown in the figure below.
Vector Loop Equation
The vector loop equation is derived by summing the position vectors around the closed loop of the four-bar linkage and setting their sum to zero:
\[\mathbf{R}_A+\mathbf{R}_{BA}-\mathbf{R}_{BO_4}-\mathbf{R}_{O_4}=0\]To obtain an alternative form of the equations, often used in analysis, complex number notation can be used for the position vectors. Using complex notation, the following is obtained
\[a e^{j\theta_2}+b e^{j\theta_3}-c e^{j\theta_4}-d e^{j\theta_1}=0\]where $a$, $b$, $c$ and $d$ represent the scalar length of each of the links.
Euler’s equation, $e^{j\theta} = (\cos \theta + j \sin \theta)$ may also be substituted into the equations to obtain this form
\[a(\cos\theta_2+j\sin\theta_2)+b(\cos\theta_3+j\sin\theta_3)-c(\cos\theta_4+j\sin\theta_4)-d(\cos\theta_1+j\sin\theta_1)=0\]Solving the Vector Loop Equation
Start from the complex vector-loop equation
\[a e^{j\theta_2} + b e^{j\theta_3} - c e^{j\theta_4} - d e^{j\theta_1} = 0.\]Using Euler’s relation,
\[e^{j\theta} = \cos \theta + j \sin \theta,\]the loop equation becomes
\[a(\cos\theta_2 + j\sin\theta_2)+b(\cos\theta_3 + j\sin\theta_3)-c(\cos\theta_4 + j\sin\theta_4)-d(\cos\theta_1 + j\sin\theta_1)=0.\]Separating the real and imaginary parts gives
Real part:
\[a \cos \theta_2 + b \cos \theta_3 - c \cos \theta_4 - d \cos \theta_1 = 0\]Imaginary part:
\[a \sin \theta_2 + b \sin \theta_3 - c \sin \theta_4 - d \sin \theta_1 = 0.\]If the ground link is aligned with the $x$-axis, then $\theta_1 = 0$, so these reduce to
\[a \cos \theta_2 + b \cos \theta_3 - c \cos \theta_4 - d = 0\]and
\[a \sin \theta_2 + b \sin \theta_3 - c \sin \theta_4 = 0.\]The derivation below keeps the same notation used in the Week 2 lecture notes, where the grouped parameters are denoted by $A$ to $F$.
Derivation for $\theta_4$
Rearrange the two scalar equations to isolate the $\theta_3$ terms:
\[b \cos \theta_3 = d + c \cos \theta_4 - a \cos \theta_2\] \[b \sin \theta_3 = c \sin \theta_4 - a \sin \theta_2.\]Square both equations and add them:
\[b^2 \cos^2 \theta_3 + b^2 \sin^2 \theta_3 = (d + c \cos \theta_4 - a \cos \theta_2)^2 + (c \sin \theta_4 - a \sin \theta_2)^2.\]Using $\cos^2 \theta_3 + \sin^2 \theta_3 = 1$ gives
\[b^2 = (d + c \cos \theta_4 - a \cos \theta_2)^2 + (c \sin \theta_4 - a \sin \theta_2)^2.\]Expand and simplify with $\cos^2 \theta_2 + \sin^2 \theta_2 = 1$ and $\cos^2 \theta_4 + \sin^2 \theta_4 = 1$:
\[b^2 = a^2 + c^2 + d^2 - 2ad \cos \theta_2 + (2cd - 2ac \cos \theta_2)\cos \theta_4 - 2ac \sin \theta_2 \sin \theta_4.\]Move everything to one side:
\[(2cd - 2ac \cos \theta_2)\cos \theta_4 - 2ac \sin \theta_2 \sin \theta_4 + (a^2 - b^2 + c^2 + d^2 - 2ad \cos \theta_2) = 0.\]It is convenient to define
\[A = 2cd - 2ac\cos\theta_2, \qquad B = -2ac\sin\theta_2, \qquad C = a^2 - b^2 + c^2 + d^2 - 2ad\cos\theta_2.\]Then the equation becomes
\[A \cos \theta_4 + B \sin \theta_4 + C = 0.\]Now define
\[t_4 = \tan\left(\frac{\theta_4}{2}\right), \qquad \cos\theta_4 = \frac{1-t_4^2}{1+t_4^2}, \qquad \sin\theta_4 = \frac{2t_4}{1+t_4^2}.\]Substituting into the grouped equation gives
\[A\left(\frac{1-t_4^2}{1+t_4^2}\right) + B\left(\frac{2t_4}{1+t_4^2}\right) + C = 0.\]Multiply through by $1+t_4^2$:
\[A(1-t_4^2) + 2Bt_4 + C(1+t_4^2) = 0.\]Expand and collect terms:
\[(C-A)t_4^2 + 2Bt_4 + (A+C) = 0.\]This is the quadratic in $t_4$. Solving gives
\[t_4 = \frac{-2B \pm \sqrt{(2B)^2 - 4(C-A)(A+C)}}{2(C-A)}.\]Therefore,
\[\theta_{4,1}=2\tan^{-1}(t_{4,1}), \qquad \theta_{4,2}=2\tan^{-1}(t_{4,2}).\]Derivation for $\theta_3$
Now rearrange the scalar equations to isolate the $\theta_4$ terms:
\[c \cos \theta_4 = a \cos \theta_2 + b \cos \theta_3 - d\] \[c \sin \theta_4 = a \sin \theta_2 + b \sin \theta_3.\]Square both equations and add them:
\[c^2 \cos^2 \theta_4 + c^2 \sin^2 \theta_4 = (a \cos \theta_2 + b \cos \theta_3 - d)^2 + (a \sin \theta_2 + b \sin \theta_3)^2.\]Using $\cos^2 \theta_4 + \sin^2 \theta_4 = 1$ gives
\[c^2 = (a \cos \theta_2 + b \cos \theta_3 - d)^2 + (a \sin \theta_2 + b \sin \theta_3)^2.\]Expand and simplify with $\cos^2 \theta_2 + \sin^2 \theta_2 = 1$ and $\cos^2 \theta_3 + \sin^2 \theta_3 = 1$:
\[c^2 = a^2 + b^2 + d^2 - 2ad \cos \theta_2 + (2ab \cos \theta_2 - 2bd)\cos \theta_3 + 2ab \sin \theta_2 \sin \theta_3.\]Move everything to one side:
\[(2ab \cos \theta_2 - 2bd)\cos \theta_3 + 2ab \sin \theta_2 \sin \theta_3 + (a^2 + b^2 + d^2 - c^2 - 2ad \cos \theta_2) = 0.\]Define
\[D = 2ab\cos\theta_2 - 2bd, \qquad E = 2ab\sin\theta_2, \qquad F = a^2 + b^2 + d^2 - c^2 - 2ad\cos\theta_2.\]Then the equation becomes
\[D \cos \theta_3 + E \sin \theta_3 + F = 0.\]Now define
\[t_3 = \tan\left(\frac{\theta_3}{2}\right), \qquad \cos\theta_3 = \frac{1-t_3^2}{1+t_3^2}, \qquad \sin\theta_3 = \frac{2t_3}{1+t_3^2}.\]Substituting into the grouped equation gives
\[D\left(\frac{1-t_3^2}{1+t_3^2}\right) + E\left(\frac{2t_3}{1+t_3^2}\right) + F = 0.\]Multiply through by $1+t_3^2$:
\[D(1-t_3^2) + 2Et_3 + F(1+t_3^2) = 0.\]Expand and collect terms:
\[(F-D)t_3^2 + 2Et_3 + (D+F) = 0.\]This is the quadratic in $t_3$. Solving gives
\[t_3 = \frac{-2E \pm \sqrt{(2E)^2 - 4(F-D)(D+F)}}{2(F-D)}.\]Therefore,
\[\theta_{3,1}=2\tan^{-1}(t_{3,1}), \qquad \theta_{3,2}=2\tan^{-1}(t_{3,2}).\]