Velocity Analysis (Vector Loop Method)
Four-Bar Linkage Vector Loop Equations
The derivation of the vector loop equation for a four-bar linkage mechanism involves defining the position vectors of the links and the angles between them. The four-bar linkage consists of four links connected by four joints, forming a closed loop as shown in the figure below.
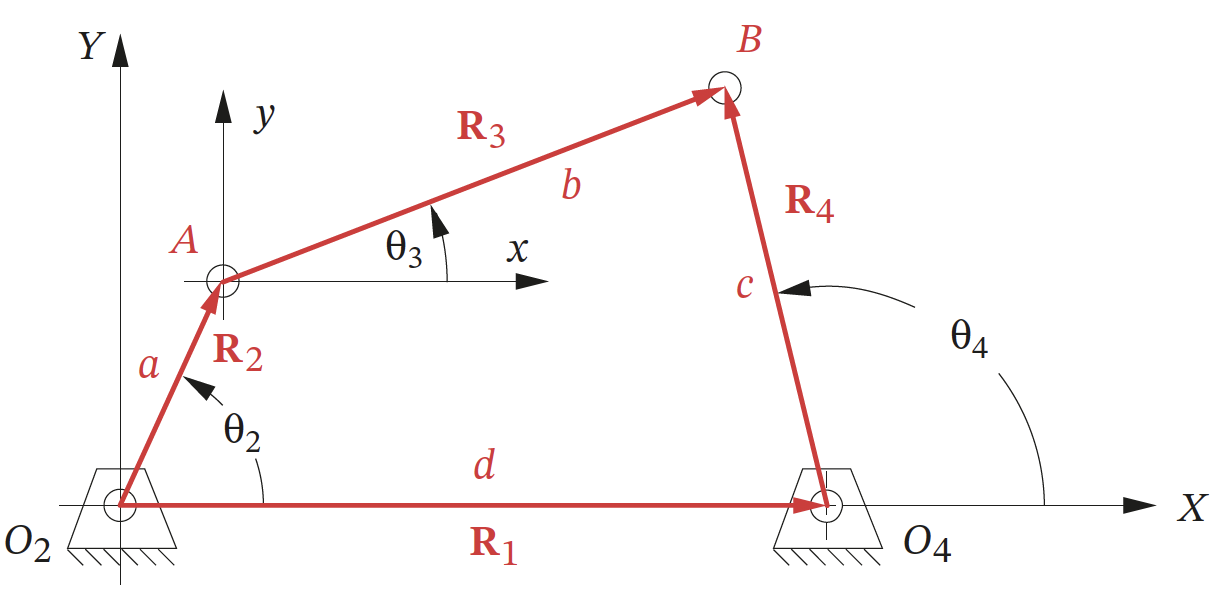
Vector Loop Equation
The vector loop equation is derived by summing the position vectors around the closed loop of the four-bar linkage and setting their sum to zero:
\[\mathbf{R}_A+\mathbf{R}_{BA}-\mathbf{R}_{BO_4}-\mathbf{R}_{O_4}=0\]To obtain an alternative form of the equations, often used in analysis, complex number notation can be used for the position vectors. Using complex notation, the following is obtained
\[a e^{j\theta_2}+b e^{j\theta_3}-c e^{j\theta_4}-d e^{j\theta_1}=0\]where $a$, $b$, $c$ and $d$ represent the scalar length of each of the links.
Euler’s equation, $e^{j\theta} = (\cos \theta + j \sin \theta)$ may also be substituted into the equations to obtain this form
\[a(\cos\theta_2+j\sin\theta_2)+b(\cos\theta_3+j\sin\theta_3)-c(\cos\theta_4+j\sin\theta_4)-d(\cos\theta_1+j\sin\theta_1)=0\]Solving for Velocities
Determining velocities from the vector loop equation is a fairly simple process.
Differentiating the loop equation from above gives
\[a e^{j\theta_2}+b e^{j\theta_3}-c e^{j\theta_4}-d e^{j\theta_1}=0\]with respect to time:
\[j a e^{j\theta_2}\frac{d\theta_2}{dt} +j b e^{j\theta_3}\frac{d\theta_3}{dt} -j c e^{j\theta_4}\frac{d\theta_4}{dt} -j d e^{j\theta_1}\frac{d\theta_1}{dt}=0\]Since the ground link is fixed, $\theta_1$ is constant and the last term is zero. The resulting velocity loop is
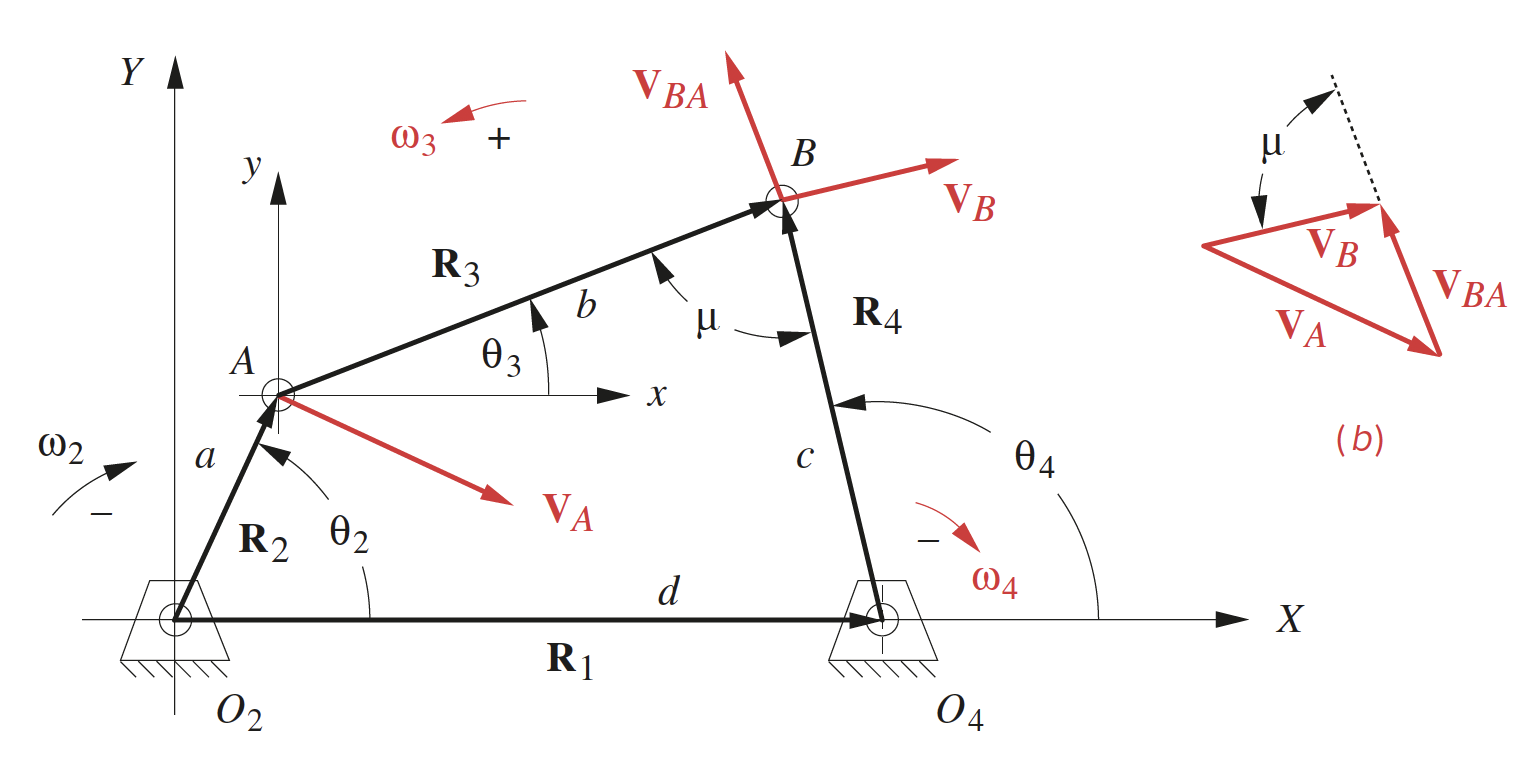
\[\mathbf{V}_A+\mathbf{V}_{BA}-\mathbf{V}_B=0\]where
\[\mathbf{V}_A=j a \omega_2 e^{j\theta_2}, \qquad \mathbf{V}_{BA}=j b \omega_3 e^{j\theta_3}, \qquad \mathbf{V}_B=j c \omega_4 e^{j\theta_4}\]using the substitution $\frac{d\theta}{dt}=\omega$. The relative velocity equation may therefore be written as
\[j a \omega_2 e^{j\theta_2}+j b \omega_3 e^{j\theta_3}-j c \omega_4 e^{j\theta_4}=0\]The above can be solved to find $\omega_3$ and $\omega_4$. First substitute Euler’s identity, $e^{j\theta}=\cos\theta+j\sin\theta$, and then multiply through by $j$ to give
\[a\omega_2(-\sin\theta_2+j\cos\theta_2)+b\omega_3(-\sin\theta_3+j\cos\theta_3)-c\omega_4(-\sin\theta_4+j\cos\theta_4)=0\]Separating into real and imaginary components gives, first, the real part:
\[-a\omega_2\sin\theta_2-b\omega_3\sin\theta_3+c\omega_4\sin\theta_4=0\]and second, the imaginary part:
\[a\omega_2\cos\theta_2+b\omega_3\cos\theta_3-c\omega_4\cos\theta_4=0\]These equations can be solved simultaneously to give
\(\omega_3=\omega_2\frac{a\sin(\theta_4-\theta_2)}{b\sin(\theta_3-\theta_4)}\) \(\omega_4=\omega_2\frac{a\sin(\theta_2-\theta_3)}{c\sin(\theta_4-\theta_3)}\)
Once $\omega_3$ and $\omega_4$ are known, it is possible to find $\mathbf{V}_{A}$, $\mathbf{V}_{BA}$, and $\mathbf{V}_{B}$.
\[\begin{align*} \mathbf{V}_A &= j a \omega_2(\cos\theta_2+j\sin\theta_2) \\ &= a \omega_2(-\sin\theta_2+j\cos\theta_2) \\[1em] \mathbf{V}_{BA} &= j b \omega_3(\cos\theta_3+j\sin\theta_3) \\ &= b \omega_3(-\sin\theta_3+j\cos\theta_3) \\[1em] \mathbf{V}_B &= j c \omega_4(\cos\theta_4+j\sin\theta_4) \\ &= c \omega_4(-\sin\theta_4+j\cos\theta_4) \end{align*}\]To determine these velocities, the current values of $\theta_3$ and $\theta_4$ must already be known from the position analysis. Given $\theta_2$ and the link lengths $a$, $b$, $c$, and $d$, those angles can be found using the method discussed in Position Analysis.